
DEEPWAVE AIR7101-0101-1 Artificial Intelligence Radio Transceiver

Artificial Intelligence Radio Transceiver
The Artificial Intelligence Radio Transceiver (AIR-T) is a high-performance software-defined radio (SDR) seamlessly integrated with state-of-the-art processing and deep learning inference hardware. The incorporation of an embedded graphics processing unit (GPU) enables real-time wideband digital signal processing (DSP) algorithms to be executed in software, without requiring specialized field programmable gate array (FPGA) firmware development. The GPU is the most utilized processor for machine learning, therefore the AIR-T significantly reduces the barrier for engineers to create autonomous signal identification, interference mitigation, and many other machine learning applications. By granting the deep learning algorithm full control over the transceiver system, the AIR-T allows for fully autonomous software defined and cognitive radio. Out of the box, the AIR-T is a fully functioning SDR that includes numerous examples and open source APIs. The system includes AirStack, the AIR-T’s complete software package. AirStack consists of the Ubuntu operating system, drivers, FPGA firmware, and everything required for AIR-T operation.
Document Overview
This document lists the specifications for the Artificial Intelligence Radio Transceiver (AIR-T). Specifications are subject to change without notice. For the most recent device specifications, refer to www.deepwavedigital.com.
Block Diagram
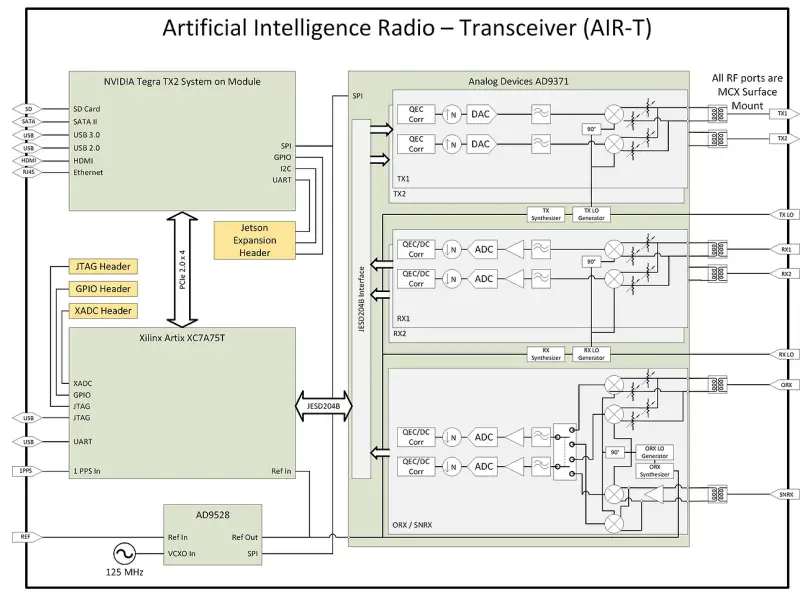
Processors
The AIR-T enables software defined radio for any signal processing application by utilizing three classes of tightly coupled processors:
- FPGA for strict real-time operations
- GPU for highly parallel processing and machine learning
- CPU for control, I/O, DSP, and software applications
General Purpose Processors
The AIR-T leverages the NVIDIA Jetson TX2 System On Module (SOM) as its General Purpose Processors (GPP). The Jetson TX2 SOM contains two ARM processors (6 cores total), an NVIDIA Pascal GPU (256 cores), and 8 GBytes of memory. The CPUs and GPU all share a common pool of memory, which (along with a unified memory architecture) allows for a zero-copy capability. As illustrated in Figure 3, zero-copy eliminates the host-to-devices (or device-to-host) memory transfer that is required by SDRs with discrete GPUs, such as an SDR connected to an external laptop or computer. Because of this, an SDR with a discrete GPU will have increased latency that is prohibitive for many applications. The AIR-T leverages zero-copy to remove this extra data transfer to enable a wide-range of SDR applications.
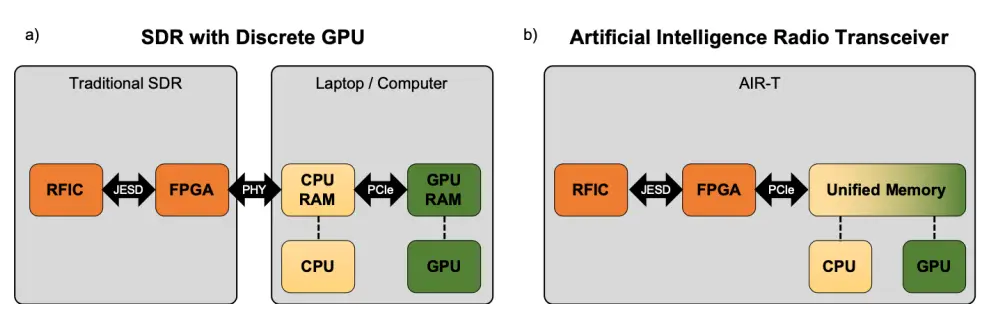
Figure 3: Comparison of a) traditional memory architecture with b) AIR-T unified memory architecture
For additional details on the NVIDIA Jetson TX2 please see that datasheet here: http://developer.nvidia.com/embedded/dlc/jetson-tx2-series-modules-data-sheet. Some of the information from that datasheet is produced below.
| Manufacturer | NVIDIA Corporation |
| Model | NVIDIA Jetson TX2 (GPU / CPU) |
| Packaging | System on Module (SOM) |
| GPU Type | NVIDIA Pascal™ GPU architecture with 256 NVIDIA CUDA cores |
| CPU Type | ARMv8 (64-bit) heterogeneous multi-processing CPU architecture with two CPU clusters (6 processor cores) connected by a coherent |
| interconnect fabric. ARM® Cortex® -A57 MPCore (Quad-Core) Processor: ● 2.0 GHz ● L1 Cache: 48KB L1 instruction cache (I-cache) per core, 32KB L1 data cache (D-cache) per core ● L2 Unified Cache: 2MB NVIDIA Denver 2 (Dual-Core) Processor: ● 2.0 GHz ● L1 Cache: 128KB L1 instruction cache (I-cache) per core, 64KB L1 data cache (D-cache) per core ● L2 Unified Cache: 2MB | |
| Unified Memory (GPU/CPU shared) | Capacity: 8 GB Type: 128-bit (4ch x 32-bit) LPDDR4 Memory Bus Frequency: 1866 MHz (59.7 GB/s) |
| Storage Capacity | 32GB eMMC 5.1 Flash Storage |
Reconfigurable FPGA
The FPGA on the AIR-T comes preloaded with the AirStack firmware to support transmit and receive functionality. Customers may choose to load custom firmware if needed by their application. Details regarding the FPGA on the AIR-T are shown below.
| Manufacturer | Xilinx |
| Family | Artix-7 |
| Model | XC7A75T-2FGG676C |
| LUTs | 47,200 |
| DSP48E1 Slices | 180 |
| Embedded Block RAM | 3.78 kbits |
| Default Timebase | 62.5 MHz or 125 MHz |
| Flash Memory (non-volatile) | 256Mb |
Networking
| Ethernet | ● 10/100/1000 BASE-T, RJ-45 connector |
| WLAN | ● IEEE 802.11a/b/g/n/ac dual-band 2×2 MIMO ● Maximum transfer rate 866.7Mbps |
| Bluetooth | ● Version 4.1 ● |
External Display
| HDMI 2.0a/b | Up to 3840×2160 at 60Hz (4k) |
Peripheral Interfaces
NVIDIA Jetson TX2
| SATA | Version 3.1 |
| SD Card | SD 3.0 or SD-XC cards up to 2 TB |
| USB | USB 3.0 Super Speed mode (up to 5Gb/s) USB 2.0 High Speed mode (up to 480Mb/s), USB On-The-Go |
| UART | See NVIDIA Jetson TX2 datasheet for information |
| GPIO | See NVIDIA Jetson TX2 datasheet for information |
| SPI | See NVIDIA Jetson TX2 datasheet for information |
| I2C | See NVIDIA Jetson TX2 datasheet for information |
| Audio Input / Output | I2S or Digital. See NVIDIA Jetson TX2 datasheet for information |
Xilinx FPGA
| JTAG | Programmable via JTAG or Digilent USB to JTAG converter |
| XADC | Integrated Analog with Digital Customization for the FPGA |
| Digital I/O | GPIO, SPI |
| UART | USB to UART bridge |
Analog Devices 9371
| GPIO | System monitoring and external attenuator control |
Transceiver
Radio Frequency Integrated Circuit
The Radio Frequency Integrated Circuit (RFIC) on the AIR-T is the Analog Devices AD9371. For additional details on the AD9371 please see that datasheet here:
https://www.analog.com/media/en/technical-documentation/data-sheets/AD9371.pdf
| Manufacturer | Analog Devices |
| Model | AD9371 |
| Frequency Conversion Type | Direct conversion |
Receiver Specifications
| Number of Channels | 2 (LO shared) |
| Sample Rates | ● 125 MSPS ● 62.5 MSPS ● 31.25 MSPS ● 15.625 MSPS |
| ● 7.8125 MSPS | |
| Maximum Bandwidth | 112.5 MHz |
| Frequency Tuning Range | 300 MHz to 6 GHz (no daughter card) |
| Power Level Control | ● Automatic Gain Control (AGC) up to 30 dB attenuation ● Manual gain control 0 to 30 dB attenuation in 0.5 dB increments |
| Maximum Input Power | ● -15 dBm (no AGC) ● 15 dBm (w/ AGC) |
| ADC Resolution | 16 bits |
| Built-in Calibrations | ● Quadrature Error Correction ● DC offset correction |
| Local Oscillator | Internal (built-in) or external |
| Auxiliary Channels1 | Sniffer, Observation |
Transmitter Specification
| Transmit Channels | 2 (LO shared) |
| Sample Rates | ● 125 MSPS ● 62.5 MSPS ● 31.25 MSPS ● 15.625 MSPS ● 7.8125 MSPS |
| Maximum Bandwidth | 112.5 MHz |
| Frequency Tuning Range | 300 MHz to 6 GHz (no daughter card) |
| Power Level Control | ● Transmit Power Control (TPC) up to 42 dB attenuation ● Manual gain control |
| Maximum Output Power | +6 dBm |
| DAC Resolution | 14 bits |
| Built-in Calibrations | ● Quadrature Error Correction |
| ● LO leakage correction | |
| Local Oscillator | Internal (built-in) or external |
- The AIR-T supports up to two transmit and two receive channels simultaneously.
Internal Reference Clock
| Clock distribution part number | AD9528 |
| Oscillator Type | VCXO |
| Oscillator Model | Crystek Corporation CVHD-950-125M |
| Oscillator Frequency | 125 MHz |
| Frequency Pull Range | ± 20 ppm |
External Reference Clock
The AIR-T will phase lock to an external 10 MHz reference signal.
| Number of Channels | 1 |
| Connector Type | ● MCX (Board) ● SMA (Enclosure) |
| Frequency | 10 MHz |
| Input Impedance | 50 Ohms |
| Input Voltage Rating | 3.3V CMOS |
| Absolute Maximum Voltage | 3.45 Volts |
Power
| Input Voltage Range | 5-15 VDC |
| Typical Standby Power Consumption | 9.3 W |
| Recommended Power Supply | 80 W, 12 VDC |
Physical
| Form Factor (no enclosure) | Mini-ITX |
| Dimensions (no enclosure) | 170 × 170 x 35 mm (6.7″ × 6.7″ x 1.4″) |
| Weight (no enclosure) | 0.35 kg (0.8 lbs) |
Proper Handling
The AIR-T is a printed circuit board with many exposed conductors. It is essential that no conductive material be left near or in contact with the system. Best practices include using an anti-static mat and other ESD procedures when handling sensitive electronic equipment, including low humidity and not exposing the radio to liquids. During the calibration procedure that is run when the radio is initialized, calibration signals may be emitted from both the TX and RX ports. To ensure that connected equipment is not damaged, it is recommended to disconnect the AIR-T from any equipment and terminate with 50 Ohms during the radio initialization.
Software
The AIR-T comes preloaded with a full software stack, called AirStack. AirStack includes all the components necessary to utilize the AIR-T, such as an Ubuntu based operating system, AIR-T specific device drivers, and the FPGA firmware. The operating system is based off of the NVIDIA Jetpack and is upgraded periodically. Please check for the latest software at www.deepwavedigital.com
Application Programming Interfaces
Applications for the AIR-T may be developed using almost any software language, but C/C++ and Python are the primary supported languages. Various Application Programming Interfaces (APIs) are supported by AirStack and a few of the most common APIs are described below.
Hardware Control
SoapyAIRT
SoapySDR is the primary API for interfacing with the AIR-T via the SoapyAIRT driver. SoapySDR is an open-source API and runtime library for interfacing with various SDR devices. The AirStack environment includes the SoapySDR and the SoapyAIRT driver to enable communication with the radio interfaces using Python or C++. The Python code below provides an operational example of how to leverage the SoapyAIRT for SDR applications.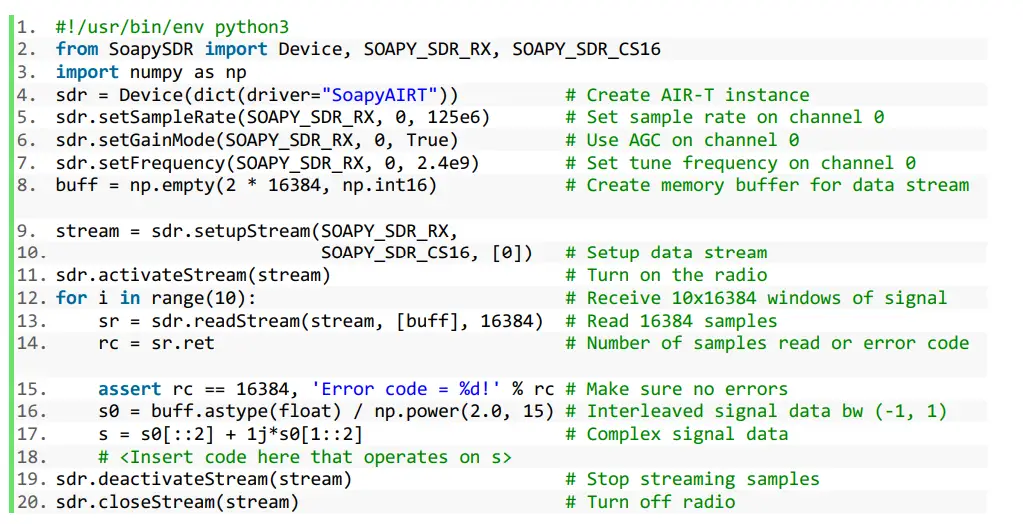
UHD
A key feature of SoapySDR is its ability to translate to/from other popular SDR APIs, such as UHD. The SoapyUHD plugin is included with AirStack and enables developers to create applications using UHD or execute existing UHD-based applications on the AIR-T. This interface is described in Figure 4.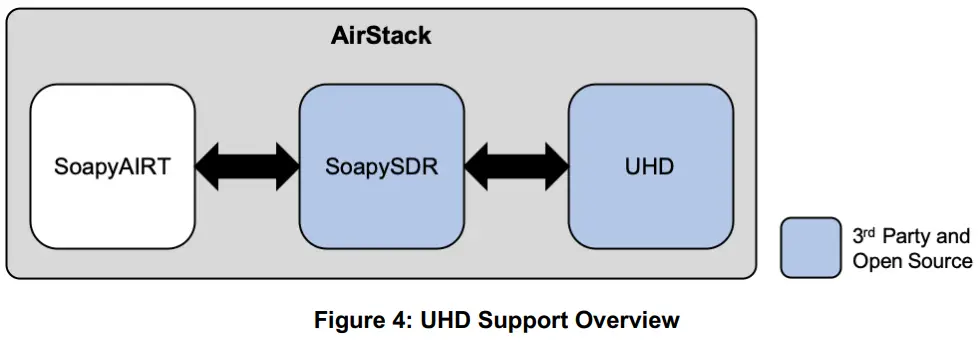
Signal Processing
Python Interfaces
Figure 5 illustrates supported Python APIs that can be used to develop signal processing applications on both the CPU and GPU of the AIR-T. In general, these have been selected because they have modest overhead compared to native code and are well suited to rapid prototyping. In addition, C++ interfaces are provided for many control and processing interfaces to the AIR-T for use in performance-critical applications. The table below outlines the common data processing APIs that are natively supported by AirStack, along with the supported GPP for each API. Some of these are included with AirStack, while some are available via the associated URL.
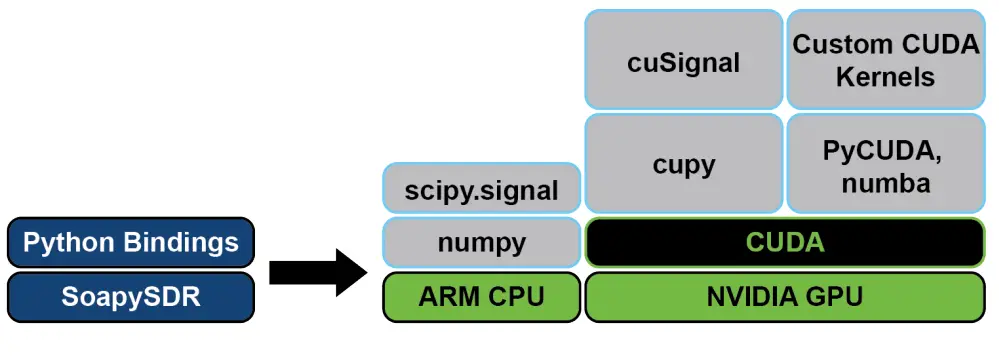
Figure 5: Python Software Suite for DSP on the AIR-T
| API | GPP | Description |
| numpy | CPU | numpy is one a common data analysis and processing Python module. URL: https://numpy.org/ |
| scipy.signal | CPU | SciPy is a scientific computing library for Python that contains a signal processing library, scipy.signal. URL: https://docs.scipy.org/doc/scipy/reference/signal.html |
| cupy | GPU | Open-source matrix library accelerated with NVIDIA CUDA that is semantically compatible with numpy. URL: https://cupy.chainer.org/ |
| cuSignal | GPU | Open-source signal processing library accelerated with NVIDIA CUDA based on scipy.signal. URL: https://github.com/rapidsai/cusignal |
| PyCUDA / numba | GPU | Python access to the full power of NVIDIA’s CUDA API URL: https://documen.tician.de/pycuda/ |
| Custom CUDA Kernels | GPU | Custom CUDA kernels may be developed and executed on the AIR-T |
GNU Radio
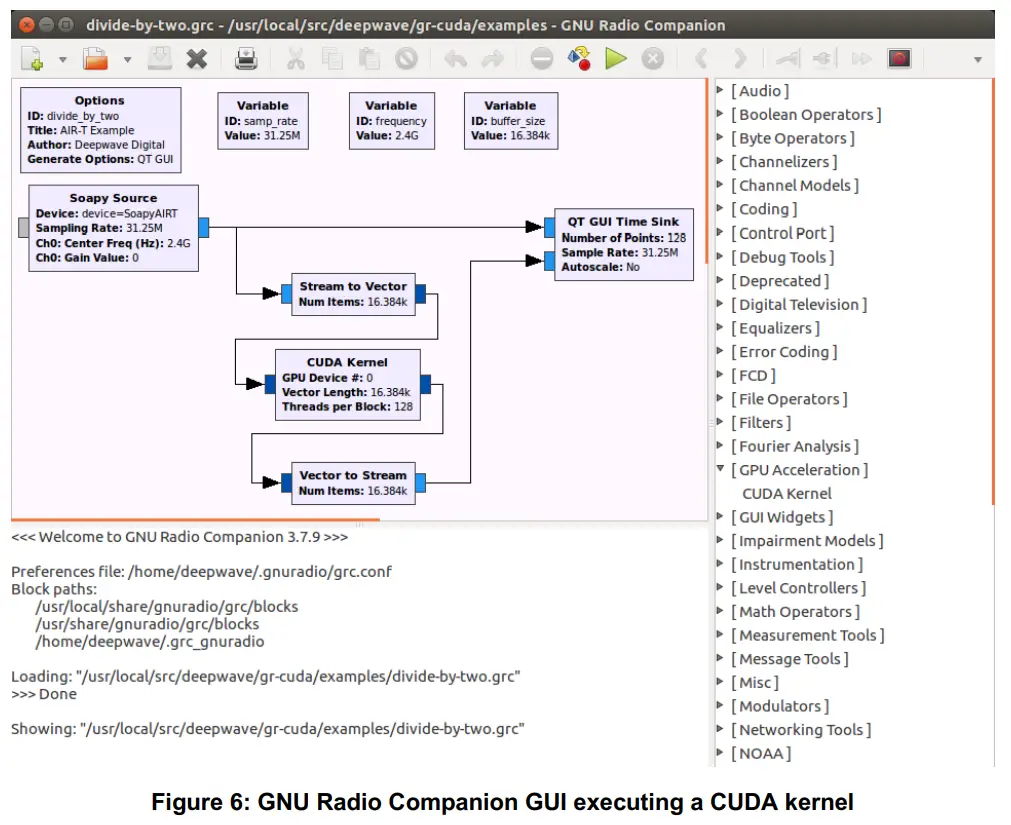
The AIR-T also supports GNU Radio, one of the most widely used open-source toolkits for signal processing and SDR. Included with AirStack, the toolkit provides modules for the instantiation of bidirectional data streams with the AIR-T’s transceiver (transmit and receive) and multiple DSP modules in a single framework. GNU Radio Companion may also be leveraged for a graphical programming interface, as shown in Figure 6. GNU Radio is written in C++ and has Python bindings. Like the majority of SDR applications, most functions in GNU Radio rely on CPU processing. Since many DSP engineers are already familiar with GNU Radio, two free and open source modules have been created for AirStack to provide GPU acceleration on the AIR-T from within GNU Radio. Gr-cuda and gr-wavelearner, along with the primary GNU Radio modules for sending and receiving samples to and from the AIR-T, are shown in the table below and included with AirStack.
| gr-cuda | A detailed tutorial for incorporating CUDA kernels into GNU Radio. URL: https://github.com/deepwavedigital/gr-cuda |
| gr-wavelearner | A framework for running both GPU-based FFTs and neural network inference in GNU Radio. URL: https://github.com/deepwavedigital/gr-wavelearner |
| gr-uhd | The GNU Radio module for supporting UHD devices. URL: https://github.com/gnuradio/gnuradio/tree/master/gr-uhd |
| gr-soapy | Vendor neutral set of source/sink blocks for GNU Radio. URL: https://gitlab.com/librespacefoundation/gr-soapy |
Deep Learning
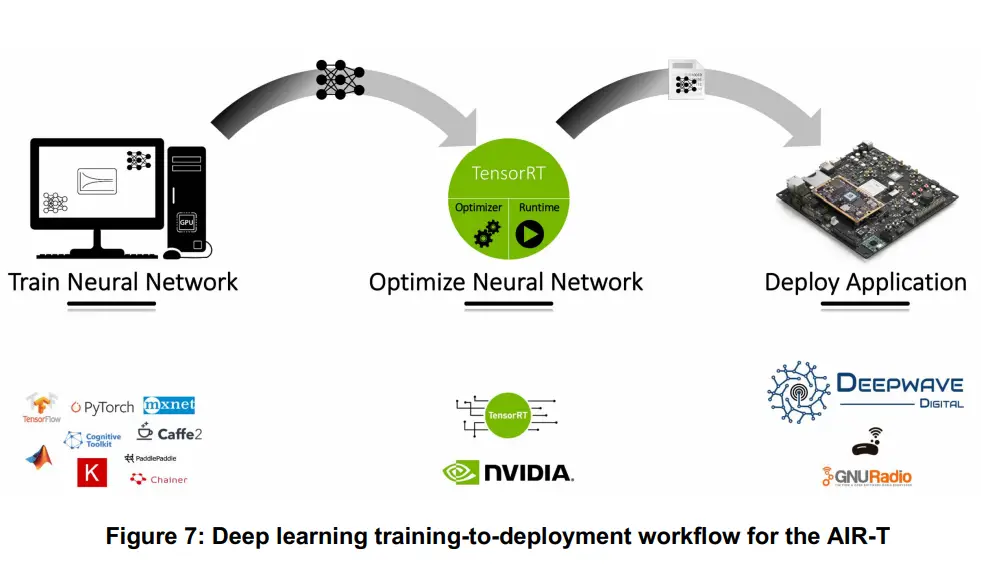
The workflow for creating a deep learning application for the AIR-T consists of three phases: training, optimization, and deployment. These steps are illustrated in Figure 7 and covered in the sections below. AirPack is an add-on software package (not included with the AIR-T) that provides source code for the complete training-to-deployment workflow described in this section. More information about AirPack may be found here: https://deepwavedigital.com/airpack/.
Training Frameworks
The primary inference library used on the AIR-T is NVIDIA’s TensorRT. TensorRT allows for optimized interference to run on the AIR-T’s GPU. TensorRT is compatible with models trained using a wide variety of frameworks as shown below.
| Deep Learning Framework | Description | TensorRT Support | Programming Languages |
| TensorFlow | Google’s deep learning framework | UFF, | Python, C++, |
| URL: www.tensorflow.org/ | ONXX | Java | |
| PyTorch | Open source deep learning framework maintained by Facebook URL: www.pytorch.org/ | ONNX | Python, C++ |
| MATLAB | MATLAB has a Statistics and Machine Learning Toolbox and a Deep Learning Toolbox URL:www.mathworks.com/solutions/deep- learning.html | ONNX | MATLAB |
| CNTK | Microsoft’s open source Cognitive Toolkit. URL: docs.microsoft.com/cognitive-toolkit/ | ONNX | Python, C#, C++ |
When training a neural network for execution on the AIR-T, make sure that the layers being used are supported by your version of TensorRT. To determine what version of TensorRT is installed on your AIR-T, open a terminal and run:
- $ dpkg -l | grep TensorRT
The supported layers may be found in the TensorRT SDK Documentation under the TensorRT Support Matrix section.
Optimization Frameworks
Once a model is trained (and saved in the file formats listed in the table above), it must be optimized to run efficiently on the AIR-T. The primary function of the AIR-T is to be an edgecompute inference engine for the real-time execution of deep learning applications. This section discusses the supported framework(s) for optimizing a DNN for deployment on the AIR-T.
TensorRT
The primary method for executing a deep learning algorithm on the AIR-T’s GPU is to use NVIDIA’s TensorRT inference accelerator software. This software will convert a trained neural network into a series of GPU operations, known as an inference engine. The engine can then be saved and used for repeated inference operations.
Deployment on the AIR-T
The procedure for deploying a trained neural network is outlined in Figure 7, where a deep neural network (DNN) is used. After the neural network has been optimized, the resulting inference engine is loaded into a user’s inference application using either the C++ or Python TensorRT API. The user’s inference application is responsible for passing signals from the radio to the inference engine and reading back the results of inference. If using GNU Radio, the GRWavelearner library provides a mechanism for building an inference application within a GNU Radio flowgraph.
Legal
The Product is sold as test equipment. If you choose to use your Product to transmit using an antenna, it is your responsibility to make sure that you are in compliance with all laws for the country, frequency, and power levels in which the device is used. Additionally, some countries regulate reception in certain frequency bands. Again, it is the responsibility of the user to maintain compliance with all local laws and regulations. Deepwave Digital is not responsible for any lawsuits, fines, or damages that violate these laws or policies.
References
 Log in | NVIDIA Developer
Log in | NVIDIA Developer The Microsoft Cognitive Toolkit - Cognitive Toolkit - CNTK | Microsoft Learn
The Microsoft Cognitive Toolkit - Cognitive Toolkit - CNTK | Microsoft Learn-
Deepwave Digital - Enabling deep learning and wireless systems with the AIR-T
-
MATLAB for Deep Learning - MATLAB & Simulink
 PyTorch
PyTorch-
TensorFlow
-
CuPy: NumPy & SciPy for GPU
-
Deepwave Digital - Enabling deep learning and wireless systems with the AIR-T
-
Signal processing (scipy.signal) — SciPy v1.11.1 Manual
-
pycuda 2022.2.2 documentation
 GitHub - deepwavedigital/gr-cuda: Tutorial for creating new OOT modules for GNU Radio that leverage pyCUDA.
GitHub - deepwavedigital/gr-cuda: Tutorial for creating new OOT modules for GNU Radio that leverage pyCUDA.-
GitHub - deepwavedigital/gr-wavelearner: Perform deep learning inference on signals
-
gnuradio/gr-uhd at master · gnuradio/gnuradio · GitHub
-
GitHub - rapidsai/cusignal: cuSignal - RAPIDS Signal Processing Library
-
librespacefoundation / gr-soapy · GitLab
-
NumPy



















