
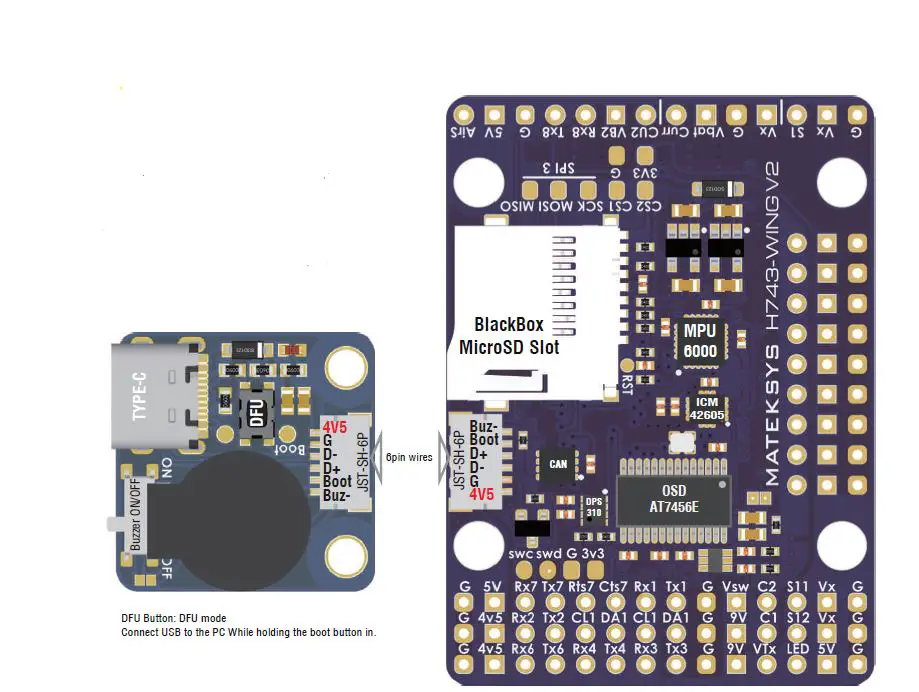
MATEKSYS STM32H743VIT6 Flight Controller H743-WING V2
- MCU: STM32H743VIT6, 480MHz, 2MB Flash
- IMU: MPU6000 (SPI1) & ICM42605 (SPI4)
- Baro: DPS310 (I2C2)
- OSD: AT7456E (SPI2)
- Blackbox: MicroSD card slot (SDIO)
- 7x Uarts (1,2,3,4,6,7,8) with built-in inversion
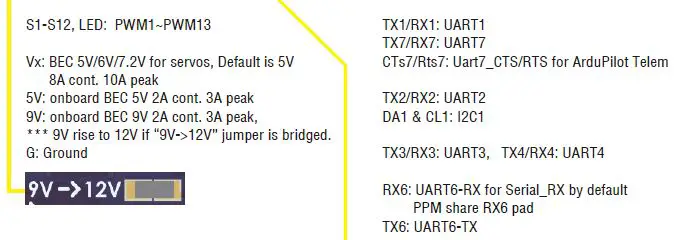
- 13x PWM outputs
- 2x I2C
- 1x CAN
- 6x ADC (VBAT, Current, RSSI, Analog AirSpeed, VB2, CU2 )
- 1x SPI3 breakout
- Switchable Dual Camera Inputs
- Switchable 5V/9V(12V) for Camera/VTX
- 8~36V DC IN (3~8S LiPo)
- High-precision Current Sense (90A continuous, 220A peak)
- BEC 5V 2A for FC
- BEC 9V 2A for camera/VTX, 12V option
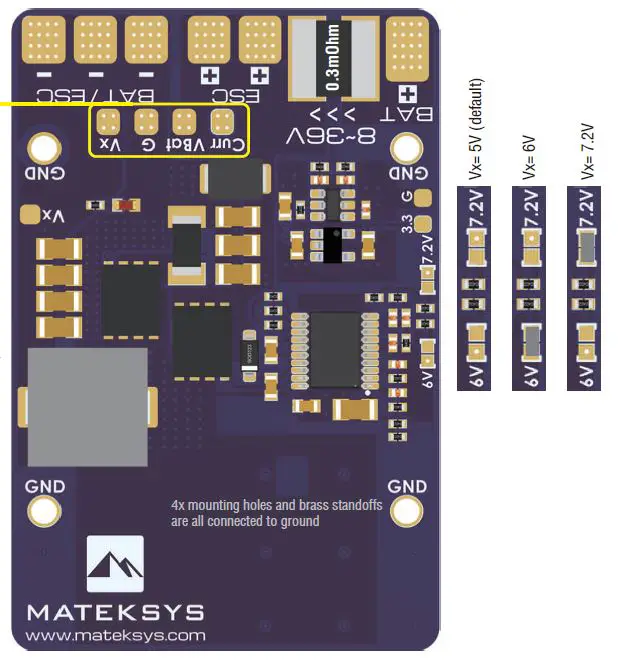
- BEC Vx 8A cont. 10A burst for servos, 5V, 6V or 7.2V option
- LDO 3.3V 200mA
- ArduPilot hwdef: MATEKH743
- INAV Target: MATEKH743
LAYOUT
Vbat: 8~36V DC IN
Voltage divider 1K:10K, Max.36V supported BATT_VOLT_PIN 10, BATT_VOLT_MULT 11
Curr: for current sensor, 0~3.3V BATT_CURR_PIN 11, BATT_AMP_PERVLT 66.7
INAV current scale: 150
VB2: Voltage divider 1K:20K, Max.69V supported BATT2_VOLT_PIN 18, BATT2_VOLT_MULT 21
CU2: for external current sensor, 0~3.3V BATT2_CURR_PIN 7
TX8/RX8: UART8
AirS: Analog Airspeed sensor (0~6.6V)
1: 1 voltage divider built-in ARSPD_PIN 4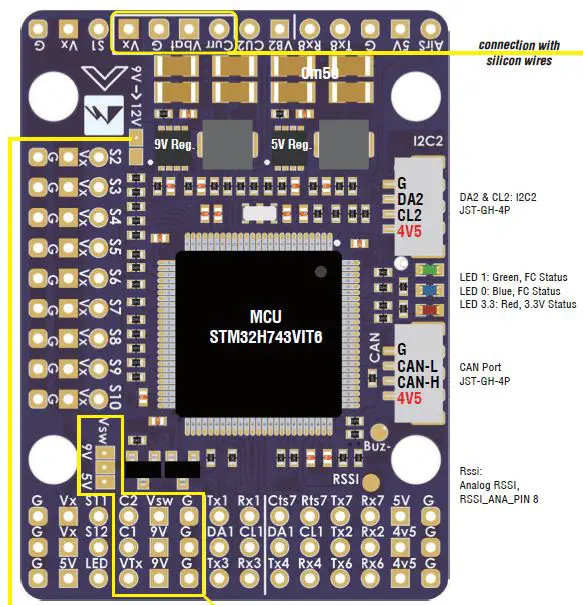
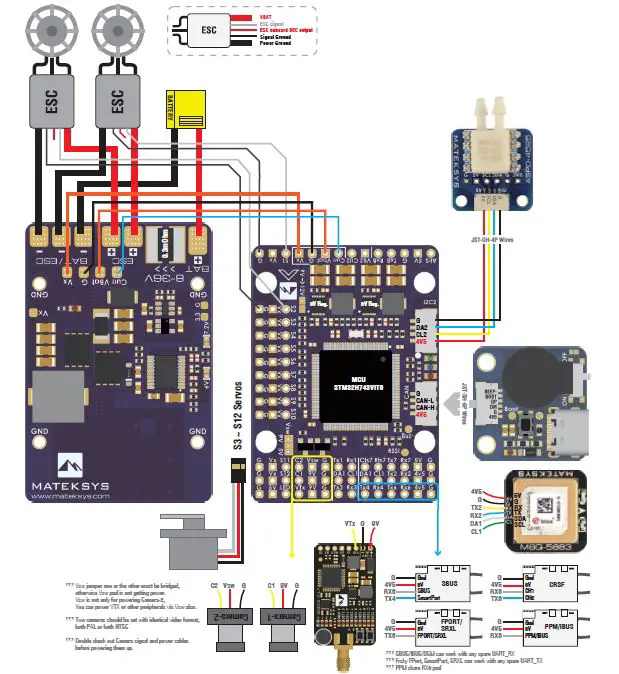
Wiring (Airplane)
INAV fw: MATEKH743
ArduPilot fw: MATEKH743
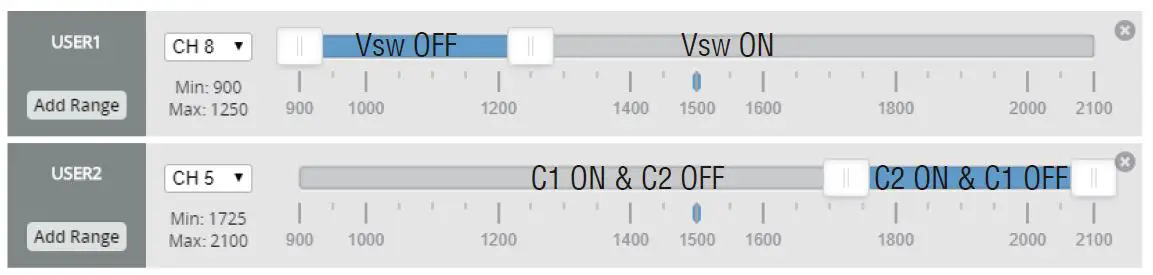
Vsw Power / Camera switch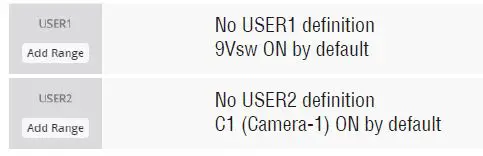
I/O Mapping
| ArduPilot | ||||||
|
PWM | S1 | PB0 | 5 V tolerant I/O | PWM1 GPIO50 | TIM8_CH2N | Group1 |
| S2 | PB1 | 3.3 V tolerant I/O | PWM2 GPIO51 | TIM8_CH3N | ||
| S3 | PA0 | 5 V tolerant I/O | PWM3 GPIO52 | TIM5_CH1 | Group2 | |
| S4 | PA1 | 5 V tolerant I/O | PWM4 GPIO53 | TIM5_CH2 | ||
| S5 | PA2 | 5 V tolerant I/O | PWM5 GPIO54 | TIM5_CH3 | ||
| S6 | PA3 | 5 V tolerant I/O | PWM6 GPIO55 | TIM5_CH4 | ||
| S7 | PD12 | 5 V tolerant I/O | PWM7 GPIO56 | TIM4_CH1 | Gourp3 | |
| S8 | PD13 | 5 V tolerant I/O | PWM8 GPIO57 | TIM4_CH2 | ||
| S9 | PD14 | 5 V tolerant I/O | PWM9 GPIO58 | TIM4_CH3 | ||
| S10 | PD15 | 5 V tolerant I/O | PWM10 GPIO59 | TIM4_CH4 | ||
| S11 | PE5 | 5 V tolerant I/O | PWM11 GPIO60 | TIM15_CH1 | Group4 | |
| S12 | PE6 | 5 V tolerant I/O | PWM12 GPIO61 | TIM15_CH2 | ||
| LED | PA8 | 5 V tolerant I/O | PWM13 GPIO62 | TIM1_CH1 | Group5 | |
| SERVO13_FUNCTION 120, NTF_LED_TYPES neopixel | ||||||
| PWM1~PWM13 are Dshot and PWM capable. However, mixing Dshot and normal PWM operation for outputs is restricted into groups, ie. enabling Dshot for an output in a group requires that ALL outputs in that group be configured and used as Dshot, rather than PWM outputs. If servo and motor are mixed in same group, make sure this group run lowest PWM frequency according to the servo specification. ie. Servo supports Max. 50Hz, ESC must run at 50Hz in this group. | ||||||
|
ADC | Vbat pad 1K:10K divider builtin | PC0 | 0~36V | Vbat ADC onboard battery voltage sense | BATT_VOLT_PIN BATT_VOLT_MULT | 10 11.0 |
| Curr pad | PC1 | 0~3.3V | Current ADC onboard current sense | BATT_CURR_PIN BATT_AMP_PERVLT | 11 66.7 | |
| VB2 Pad 1K:20K divider builtin | PA4 | 0~69V | Vbat2 ADC | BATT2_VOLT_PIN BATT2_VOLT_MULT | 18 21.0 | |
| CU2 Pad | PA7 | 0~3.3V | Current2 ADC | BATT2_CURR_PIN BATT2_AMP_PERVLT | 7 / | |
| RSSI Pad | PC5 | 0~3.3V | RSSI ADC Analog RSSI | RSSI_ANA_PIN RSSI_TYPE | 8 1 | |
| AirS Pad 20K:20K divider builtin | PC4 | 0~6.6V | AirS ADC Analog Airspeed | ARSPD_PIN ARSPD_TYPE | 4 2 | |
|
I2C | I2C1 CL1/DA1 | PB6/PB7 | 5 V tolerant I/O | Compass | COMPASS_AUTODEC | 1 |
| I2C2 CL2/DA2 on JST-GH-4P |
PB10/PB11 |
5 V tolerant I/O | on board Baro DPS310 | Address | 0x76 | |
| Digital Airspeed I2C MS4525 DLVR-L10D | ARSPD_BUS ARSPD_TYPE ARSPD_TYPE | 0 1 9 | ||||
|
CAN |
CAN1 |
PD0/PD1 |
5 V tolerant I/O | CAN Node | CAN_D1_PROTOCOL CAN_P1_DRIVER | 1 1 |
| CAN GPS CAN Compass CAN Airspeed sensor | GPS_TYPE COMPASS_TYPEMASK ARSPD_TYPE | 9 0 8 | ||||
|
UART | USB | PA11/PA12 | 5 V tolerant I/O | USB | console | SERIAL0 |
| RX7 TX7 RTS7 CTS7 | PE7/8/9/10 | 3.3 V tolerant I/O | UART7 | telem1 | SERIAL1 | |
| TX1 RX1 | PA9/PA10 | 5 V tolerant I/O | USART1 | telem2 | SERIAL2 | |
| TX2 RX2 | PD5/PD6 | 5 V tolerant I/O | USART2 | GPS1 | SERIAL3 | |
| TX3 RX3 | PD8/PD9 | 5 V tolerant I/O | USART3 | GPS2 | SERIAL4 | |
| TX8 RX8 | PE1/PE0 | 5 V tolerant I/O | UART8 | USER | SERIAL5 | |
| TX4 RX4 | PB9/PB8 | 5 V tolerant I/O | UART4 | USER | SERIAL6 | |
| TX6 RX6 | PC6/PC7 | 5 V tolerant I/O | USART6 | RC input/Receiver | SERIAL7 | |
| RX6 | SBUS/IBUS/DSM/PPM | |||||
| TX6 | FPORT/SRXL2 | |||||
| INAV | |||||
|
PWM | S1 | PB0 | 5 V tolerant I/O | TIM3_CH3 | Fixed Wing Motor |
| S2 | PB1 | 3.3 V tolerant I/O | TIM3_CH4 | ||
| S3 | PA0 | 5 V tolerant I/O | TIM5_CH1 |
Fixed Wing Servo | |
| S4 | PA1 | 5 V tolerant I/O | TIM5_CH2 | ||
| S5 | PA2 | 5 V tolerant I/O | TIM5_CH3 | ||
| S6 | PA3 | 5 V tolerant I/O | TIM5_CH4 | ||
| S7 | PD12 | 5 V tolerant I/O | TIM4_CH1 | ||
| S8 | PD13 | 5 V tolerant I/O | TIM4_CH2 | ||
| S9 | PD14 | 5 V tolerant I/O | TIM4_CH3 | ||
| S10 | PD15 | 5 V tolerant I/O | TIM4_CH4 | ||
| S11 | PE5 | 5 V tolerant I/O | TIM15_CH1 | ||
| S12 | PE6 | 5 V tolerant I/O | TIM15_CH2 | ||
| LED | PA8 | 5 V tolerant I/O | TIM1_CH1 | 2812LED | |
|
ADC | Vbat pad 1K:10K divider builtin | PC0 | 0~36V | Vbat ADC ADC_CHANNEL_1 | scale 1100 |
| Curr Pad | PC1 | 0~3.3V | Current ADC ADC_CHANNEL_2 | scale 150 | |
| RSSI Pad | PC5 | 0~3.3V | RSSI ADC ADC_CHANNEL_3 | Analog RSSI | |
| AirS Pad 20K:20K divider builtin | PC4 | 0~6.6V | AirS ADC ADC_CHANNEL_4 | Analog Airspeed | |
| VB2 Pad 1K:20K divider builtin | PA4 | 0~69V | ADC_CHANNEL_5 | scale 2100 | |
| CU2 Pad | PA7 | 0~3.3V | ADC_CHANNEL_6 | spare | |
|
I2C | I2C1 CL1/DA1 | PB6/PB7 | 5 V tolerant I/O | Compass | QMC5883 / HMC5883 IST8310 / IST8308 MAG3110 / LIS3MDL |
| OLED | 0.96″ | ||||
| I2C2 CL2/DA2 on JST-GH-4P | PB10/PB11 | 5 V tolerant I/O | onboard Barometer | DPS310 | |
| Digital Airspeed sensor | MS4525 | ||||
| Temperature sensor | |||||
|
UART | USB | PA11/PA12 | 5 V tolerant I/O | USB | |
| TX1 RX1 | PA9/PA10 | 5 V tolerant I/O | USART1 | telem2 | |
| TX2 RX2 | PD5/PD6 | 5 V tolerant I/O | USART2 | GPS1 | |
| TX3 RX3 | PD8/PD9 | 5 V tolerant I/O | USART3 | GPS2 | |
| TX4 RX4 | PB9/PB8 | 5 V tolerant I/O | UART4 | USER | |
| TX6 RX6 | PC6/PC7 | 5 V tolerant I/O | TX6 & RX6 | CRSF | |
| UART6_RX | SBUS/IBUS/DSM/PPM | ||||
| UART6_TX | FPORT/SRXL2 | ||||
| RX7 TX7 | PE7/PE8 | 3.3 V tolerant I/O | UART7 | telem1 | |
| TX8 RX8 | PE1/PE0 | 5 V tolerant I/O | UART8 | USER | |



















