
![]()
FLIGHT CONTROLLER H743-WING V2
QUICK START GUIDE
MCU: STM32H743VIT6, 480MHz, 2MB Flash
IMU: MPU6000 (SPI1) & ICM42605 (SPI4)
Baro: DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: MicroSD card slot (SDIO)
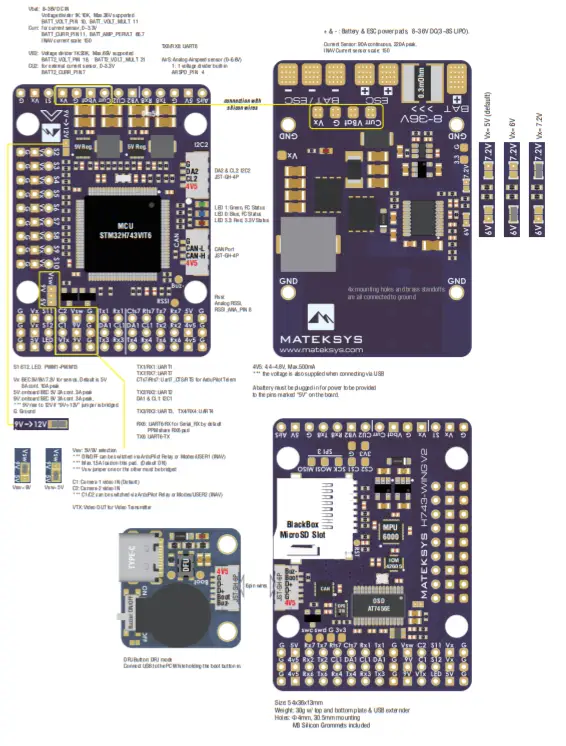
7x Uarts (1,2,3,4,6,7,8) with built-in inversion ,13x PWM outputs ,2x I2C, 1x CAN, 6x ADC (VBAT, Current, RSSI, Analog AirSpeed, VB2, CU2 ) ,1x SPI3 breakout Switchable Dual Camera Inputs Switchable 5V/9V(12V) for Camera/VTX
8~36V DC IN (3~8S LiPo)
High-precision Current Sense (90A continuous, 220A peak)
BEC 5V 2A for FC
BEC 9V 2A for camera/VTX, 12V option
BEC Vx 8A cont. 10A burst for servos, 5V, 6V or 7.2V option
LDO 3.3V 200mA
ArduPilot hwdef: MATEKH743
INAV Target: MATEKH743
LAYOUT
Wiring (Airplane)
INAV fw: MATEKH743
ArduPilot fw: MATEKH743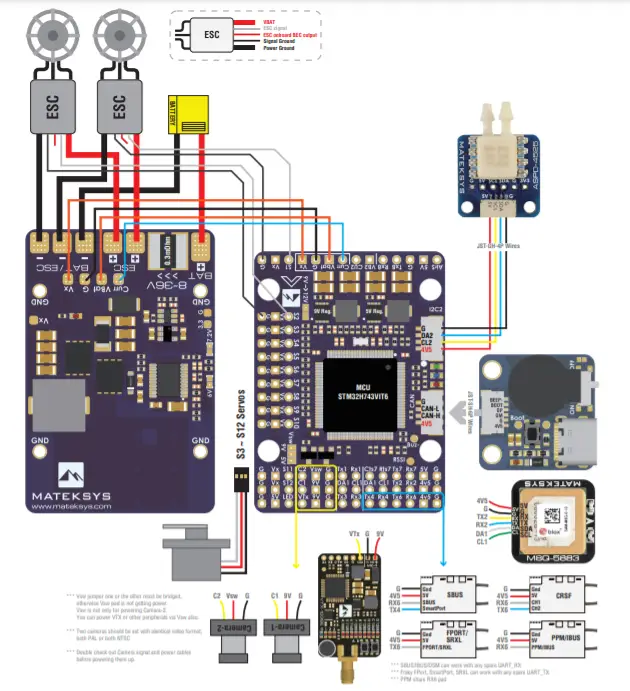
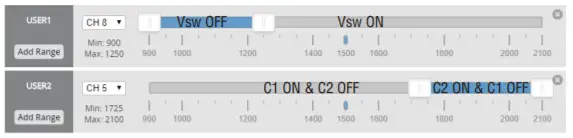
Vsw Power / Camera switch
| No USER1 definition 9Vsw ON by default | |
| No USER2 definition C1 (Camera-1) ON by default |
I/O Mapping
ArduPibot | ||||||
| S1 | PBO | 5V tolerant 1/0 | PWM1 GP1050 | TIM8 CH2N | Groups | |
| S2 | PB1 | 3.3 V tolerant WO | PWM2 GPI051 | TIME CH3N | ||
| S3 | PAO | 5 V tolerant VO | PWM3 GPI052 | TIM5 CH1 | Group? | |
| S4 | PA1 | 5 V tolerant VO | PWM4 GPI053 | TIM5 CH2 | ||
| S5 | PA2 | 5 V tolerant WO | PWM5 GPI054 | TIM5 CH3 | ||
| S6 | PA3 | 5 V tolerant I/O | PWM6 GPI055 | TIM5 CH4 | ||
| S7 | PD12 | 5 V tolerant I/O | PWM7 GPI056 | TIM4 CH1 | Gourp3 | |
| S8 | P013 | 5 V tolerant VO | PWM8 GP1057 | TIM4 CH2 | ||
| S9 | PD14 | 5 V tolerant I/O | PWM9 GP1058 | TIM4 CH3 | ||
| S10 | P015 | 5 V tolerant I/O | PWM10 GP1059 | TIA14 CH4 | ||
| Sll | PES | 5 V tolerant I/0 | PWM 11 GP1080 | T1M15 CHI | Group4 | |
| S12 | PE6 | 5 V tolerant VO | PWM12 GP10131 | 11M15 CH2 | ||
| LED | PA8 | 5 V tolerant I/O | PWM13 GPI062 | TIM I CH1 | Group6 | |
| SERV013_FUNCTION 120, NTF_LED_TYPES neopIxel | ||||||
| PWMI-PWM13 are Dshot and PWM capable. However. mixing Dshot and normal PWM operation kir outputs are restricted Into groups, ie. enabling Dshot bran output In a group requires that ALL outputs In that group be configured and used as Dshot. rather than PWM outputs. If serve and motor are mixed in the same group, make sure this group runs the lowest PWM frequency according to the serve specification. it Seto supports Max. 50Hz, ESC must run at 50Hz in this group. | ||||||
| ADC | Vbat pad 1K:10K deader builtin | PC0 | 0-36V | Vbat ADC onboard battery spoilage sense | BATT_VOLT PIN BATT VOLT –MULT | 10 11.0 |
| pad | 00-3.3V ect | o- | Current ADC onboard current sense | BAIT CURR PIN BAIT AMP PERVLT | 11 66.7 | |
| VB2 Pad 1K:20K holder builtin | PA4 | 0-89V | Vbat2 ADC | BATT2 VOLT PIN BAT12 VOLT MULT | 18 21.0 | |
| CW Pad | PA7 | 0-3.3V | Current2 ADC | BAT12_CURR PIN BATT2 AMP PERVLT | 7 / | |
| RSSI Pad | PC5 | 0-3.3V | RSSI ADC Analog RSSI | RSSI_ANA PIN RSSI TYPE | 8 I | |
| AI’S Pad 20K:20K Mader bulletin | PG | 0-8.8V | 0-6.8V ADC Analog Airspeed | ARSPD PIN ARSPD TYPE | 4 2 | |
| I2C | 12C1 CL1/DA1 | PB8IPB7 | 5 V tolerant I/O | Compass | COMPASS_AUTODEC | I |
| I202 CL2/DA2 on JST4144P | PSICVPB11 | 5 V tolerant I/O | onboard Baro DPS3I0 | Address | 0x76 | |
| Digital Airspeed I2C MS4525 DIVR1100 | AFtSPD BUS –TYPE ARSPD_ ARSPD TYPE | 0 19 | ||||
| CAN | CANT | PDO/PD1 | 5 V tolerant I/O | CAN Nods | CAN_ DI PROTOCOL CAN P–1 DARNER | I 1 |
| CAN GPS CAN Compass CAN Airspeed sensor | GPS_TVPE COMPASS TYPEAAASK ARSPD TYPE | 9 0 8 | ||||
| UART | USB | PAI1IP/112 | 5 V tolerant I/O | USB | console | SERIAL() |
| RX/ TX/ RTS7 CIS? | PE7/8/9/10 | 3.3 V tolerant I/O | UART7 | teleml | SERIALI | |
| DO WO | PA9/PA10 | 5 V tolerant I/O | USARTI | telem2 | SERIAL2 | |
| T)Q RX2 | PD5/PD6 | S V tolerant I/O | USART2 | GPS I | SERIAL3 | |
| 1)0 MO | PD8IPD9 | S V tolerant I/O | USART3 | GPS2 | SERIAL4 | |
| TX8 FtX8 | PEOPLE | 5 V tolerant VO | UART8 | USER | SERIALS | |
| TX4 RX4 | PB9/PB8 | S V tolerant I/O | UART4 | USER | SERIALS | |
| TX8 RM3 | PC8/PC7 | 5 V tolerant I/O | ‘, SAWS | RC input/Rev:11%er | SERIAL7 | |
| R)03 | SBS/IBUS/DSM/PPM | |||||
| DB | FPORT/SRX2 | |||||
INAV | |||||
| PWM | Si | PBO | 5 V tolerant 1/0 | 11M3 CH3 | Fixed Wing Motor |
| S2 | PB1 | 3.3 V tolerant I/O | 11M3 CH4 | ||
| S3 | PAO | 5 V tolerant I/0 | T1M5 CH1 | Fixed Wing Servo | |
| S4 | PA1 | 5 V tolerant I/0 | T1M5 CH2 | ||
| S5 | PA2 | 5 V tolerant I/0 | T1M5 CH3 | ||
| S6 | PA3 | 5 V tolerant I/0 | T1M5 CH4 | ||
| S7 | PD12 | 5 V tolerant I/0 | T1M4 CH1 | ||
| S8 | PD13 | 5 V tolerant I/0 | T1M4 CH2 | ||
| S9 | PD14 | 5 V tolerant I/O | T1M4 CH3 | ||
| S10 | PD15 | 5 V tolerant 1/0 | 11M4 CH4 | ||
| S11 | PE5 | 5 V tolerant VO | T1M15 CH1 | ||
| S12 | PE6 | 5 V tolerant I/O | TIMI5 CH2 | ||
| LED | PAS | 5 V tolerant 1/0 | 11M1 CH1 | 2812LED | |
| ADC | Vbat pad 1K:10K divider builtin | PCO | 0-36V | Vbat ADC ADC CHANNEL 1 | scale 1100 |
| Cun– Pad | PC1 | 0-3.3V | Current ADC ADC CHANNEL 2 | scale 150 | |
| RSSI Pad | PC5 | 0-3.3V | RSSI ADC ADC CHANNEL 3 | Analog RSSI | |
| AirS Pad 20K:20K divider builtin | PC4 | 0-6.6V | AirS ADC ADC CHANNEL 4 | Analog Airspeed | |
| VB2 Pad 1K:20K divider builtin | PA4 | 0-69V | ADC CHANNEL 5 – – | scale 2100 | |
| CU2 Pad | PA7 | 0-3.3V | ADC CHANNEL 6 | spare | |
| 12C | 12C1 CL1/DA1 | PB6/PB7 | 5 V tolerant 1/0 | Compass | QMC5883 / HMC5883 IST8310 / IST8308 MAG3110 / LIS3MDL |
| OLED | 0.96″ | ||||
| 12C2 CL2/DA2 on JST-GH-4P | PB10/PB11 | 5 V tolerant I/0 | onboard Barometer | DPS310 | |
| Digital Airspeed sensor | MS4525 | ||||
| Temperature sensor | |||||
| UART | USB | PA11/PAl2 | 5 V tolerant I/0 | USB | |
| Do RX1 | PA9/PA10 | 5 V tolerant I/O | USARTI | telem2 | |
| TX2 R.>2 | PD5/PD6 | 5 V tolerant WO | USART2 | GPS1 | |
| 1.>3 RX3 | PD8/PD9 | 5 V tolerant WO | USART3 | GPS2 | |
| Do RX4 | PB9/PB8 | 5 V tolerant I/O | UART4 | USER | |
| D. RXB | PC6/PC7 | 5 V tolerant I/O | TX6 & R X6 | CRSF | |
| UART6 RX | SBUS/IBUS/DSM/PPM | ||||
| UART6 TX | FPORT/SRXL2 | ||||
| R) TX/ | PE7/PE8 | 3.3 V tolerant 1/0 | UART7 | teleml | |
| TV3 RX8 | PE1/PEO | 5 V tolerant I/O | UART8 | USER | |
www.mateksys.com
Sep.2021 Rev 1.0



















