
![]()
LR-D1 USER MANUAL

Technical Data :
Table 1: Specification
| Starting Frequency | 24 GHz |
| Bandwidth | 250 MHz |
| Power Consumption | <11.00 W |
| Operating Voltage | 10 – 30 V |
| Altitude Range | 1.4m-500m (1) |
| Altitude Precision | ±0.7m (2) |
| Update Rate | 40Hz |
| Detection Angle Range | Azimuth 43° , Elevation 30° ( 3) |
| Maximum Velocity | up to 60m/s in elevation |
| Detection Velocity Range | <±45m/s |
| Temp. Range | -40°C-60°C |
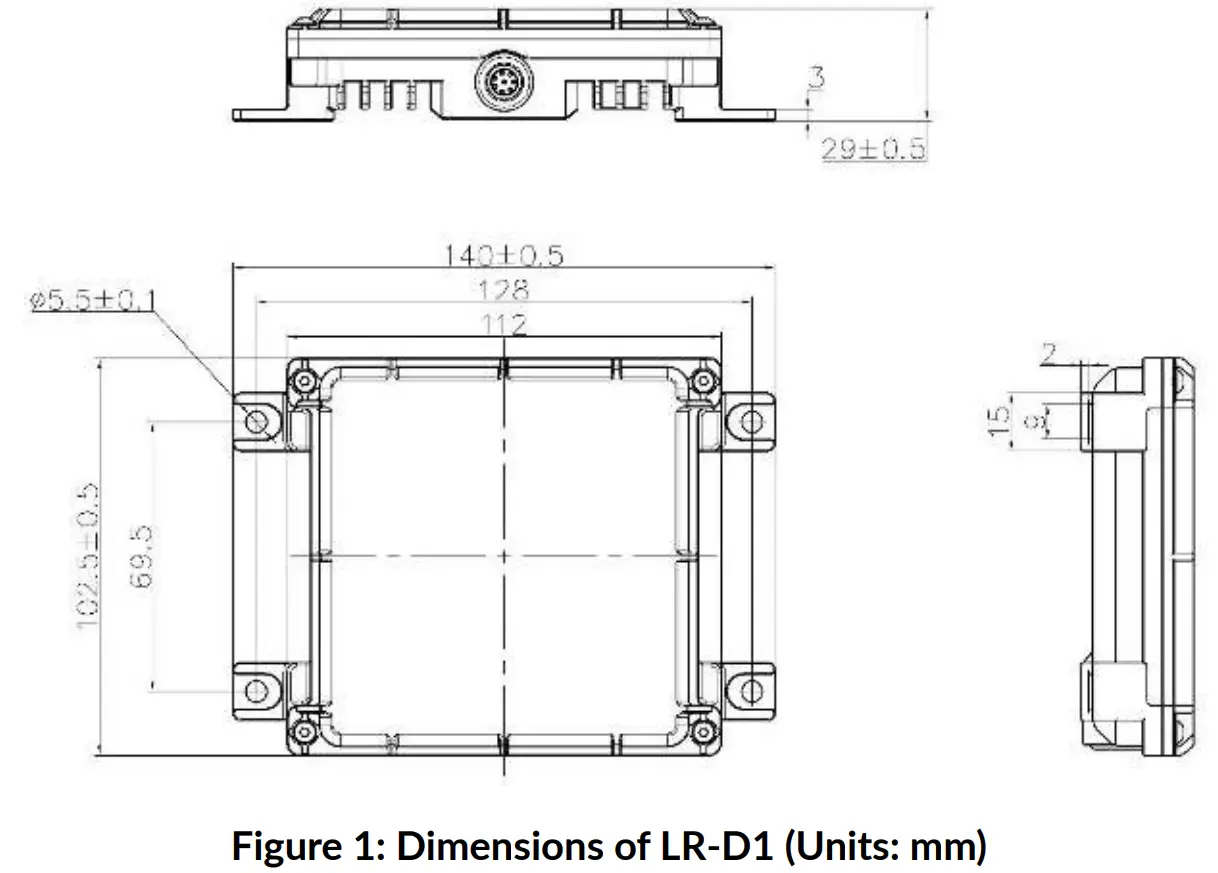
| Dimensions | <112mm*102.5mm*29mm (mounting bracket is NOT included) |
| Weight | 300g (exclude external connector cable) |
| IP Rating | Built to the requirements of IP67 (Test Pending) (4) |
| Vibration Rating | GB/T 2423.10-2008 sine vibration 5g XYZ three-axis |
| Shock Rating | GB/T 2423.5-1995 half-sine shock 20g XYZ three-axis |
| ESD Rating | GB/T 17626.2 8K/15K contact/air B class |
Note:
- Radar data may vary over different terrains when the radar is out of its detection range. Please see Appendix 1 for more details.
- Range detection might be limited by terrains, pitch, a roll of aircraft, etc. The range accuracy above only indicates the step size of data from the radar itself.
- Based on mm-wave radar specs, a large angle of pitch and roll would bring errors for detection. Under the same measurement circumstance, a larger angle by aircraft brings more error.
- IP rate here only focuses on radar itself. This rating does not cover any cabling interface.
UART Data Protocol for LR-D1
- Protocol: UART
- I/O Standard: 3.3V LVTTL
- Baud Rate: 115200 b/s
- Data length: 8 bits, plus one start bit and one stop bit, and no parity bit
Table 2: Data Packet Definition
| From | LR-D1 | To | Receiver |
| Byte | Data | Note | |
| data1 | OxEB | Packet Header MSB (Most Significant Bits) | |
| data2 | 0x90 | Packet Header LSB (Least Significant Bits) | |
| data3 | device | Device ID Byte (This Byte value can be customized or default in Ox00) | |
| data4 | Ox1C | Data packet length | |
| data5 | Ox00: Normal Others: Malfunction | Malfunction Alert | |
| data6 | Ox01 | Objects Number (Default firmware only detect ONE object) | |
| data7 | high 1_h | Object 1 Altitude MSB | |
| data8 | highly | Object 1 Altitude LSB | |
| data9 | snarl | Object 1 SNR | |
| data10 | speed th | Object 1 Velocity MSB | |
| data11 | speedt1 | Object 1 Velocity LSB | |
| datal2 | high2_h | OxFF | |
| data13 | high2_I | OxFF | |
| data 14 | snr2 | OxFF | |
| data 15 | speed2_h | OxFF | |
| data16 | speed2_I | OxFF | |
| data17 | high3_h | OxFF | |
| data18 | high3_I | OxFF | |
| datal9 | snr3 | OxFF |
| data20 | speed3_h | OxFF |
| data2l | speed3_I | OxFF |
| data22 | high4_h | OxFF |
| data23 | high4_I | OxFF |
| data24 | snr4 | OxFF |
| data25 | speed4_h | OxFF |
| data26 | speed4_I | OxFF |
| data27 | high5_h | OxFF |
| data28 | high_I | OxFF |
| data29 | snr5 | OxFF |
| data30 | speed5_h | OxFF |
| data3l | speed5_I | OxFF |
| data32 | checksum | Checksum: (data4+data5+…+data29+data31) bitwise-AND with OxFF |
Note:
- Please see Appendix 1 for details about malfuncAon informaAon.
- AlAtude Data Parse: AlAtude = (high_h * 256) + high_l; unit: 0.01 m (cm).
- Velocity Data Parse: Velocity = (speed _h * 256) + speed _l; unit: 0.1m/s.
- V1.0 only detect ONE object, any data bytes of other objects are 0xFF.
Mechanical Drawing
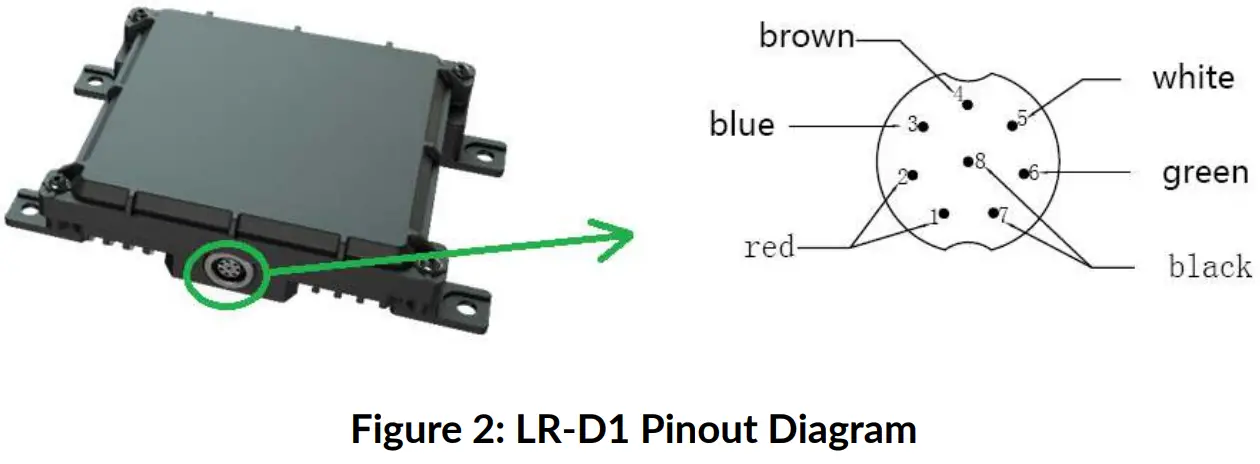
Hardware Interface
Table 3: Pin Out Definition
| Pin | Wire Color | Pin Name | Function | Note |
| 1 | Red | VCC | Input Voltage | 10 – 30 V Power < 11W |
| 2 | Red | VCC | Input Voltage | 10 – 30 V Power < 11W |
| 3 | Blue | T+ | RS422: TX+ RS232: TX | Default Setting: RS232 |
| 4 | Brown | T- | RS422: TX- RS232: RX | Default Setting: RS232 |
| 5 | White | R+ | RS422: RX + | Leave unwired for RS232 |
| 6 | Green | R- | RS422: RX | Leave unwired for RS232 |
| 7 | Black | GND | Ground | |
| 8 | Black | GND | Ground |
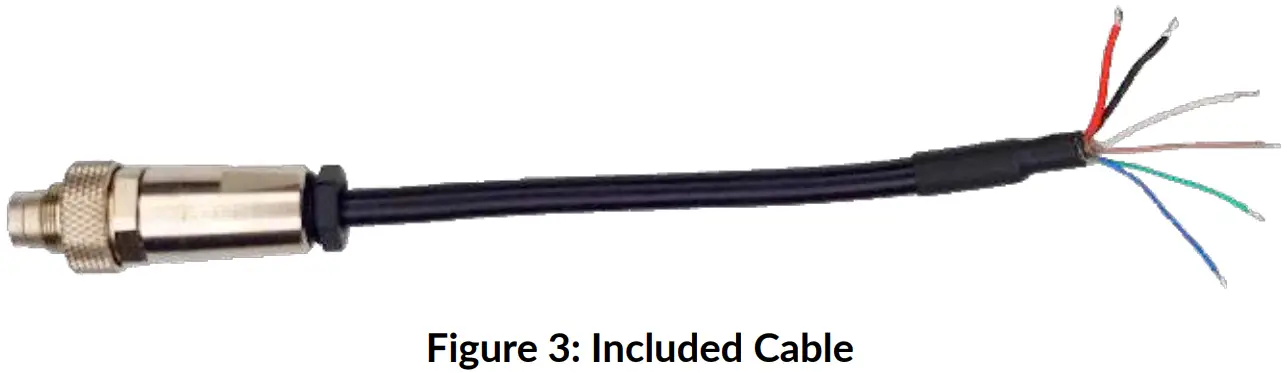
Cabling Diagram
- Connector Part Number: 99-0425-10-08
○ Purchasing Link
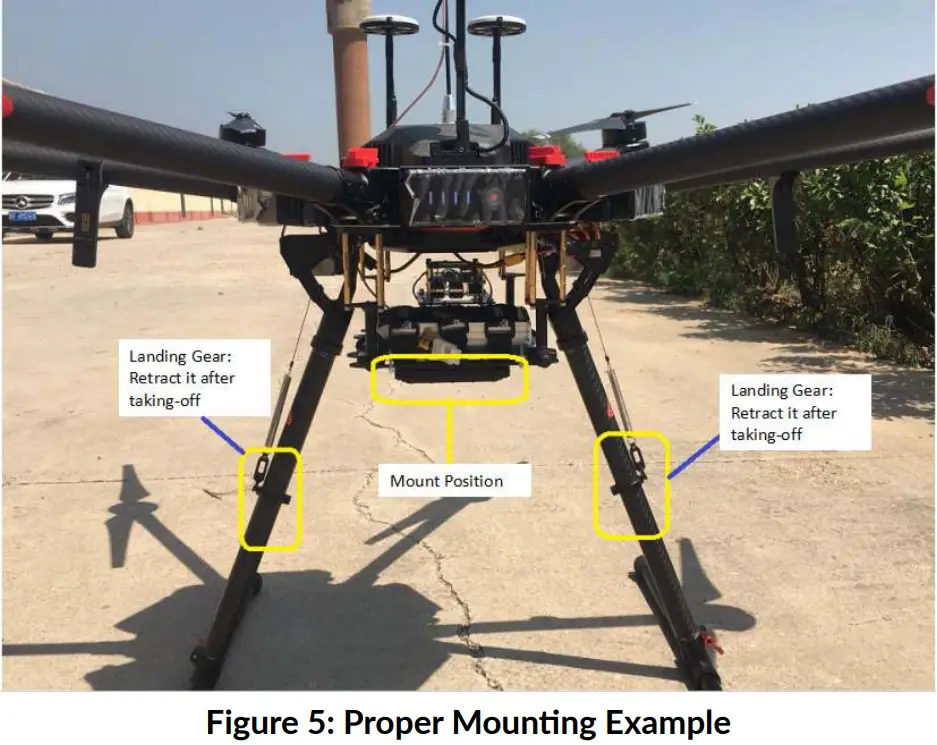
Installation Instructions
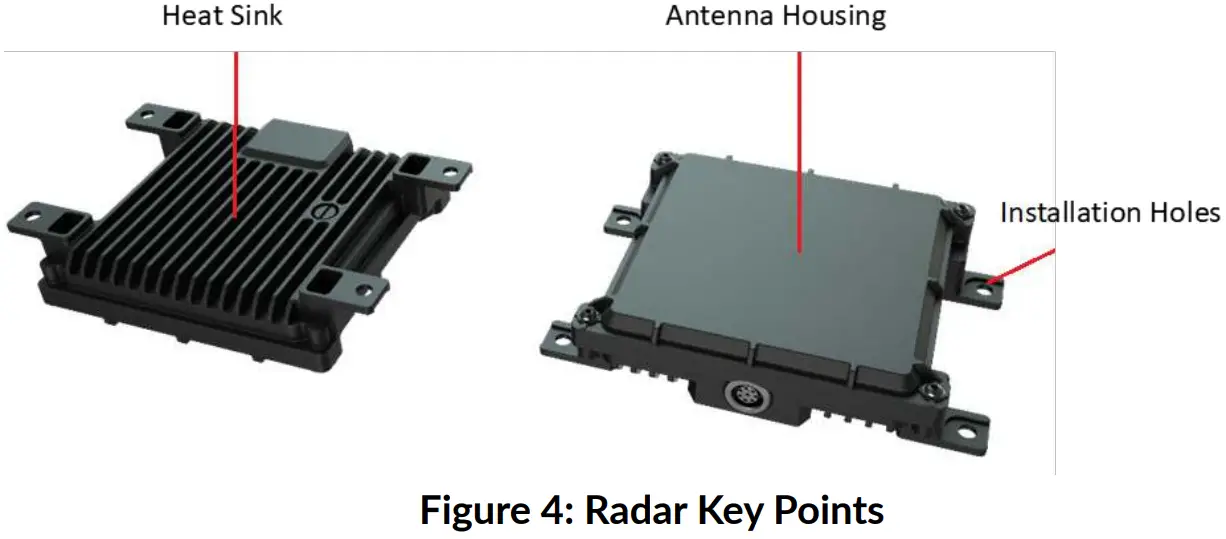
Mounting Requirements:
- The antenna should be perpendicular to the target that to be measured
- Keep antenna housing clean, and do not cover it.
- Keep any unexpected objects out of radar’s FoV (Field of View), otherwise, it might situate the radar’s signal
- No specific requirement for mount orientation
About Einstein
Our mission is to enable safer driving, flying, working, and living through radar-based technology. We are in the business of improving safety and protecting valuable assets through innovations in radar technology.
Einstein makes radar systems smarter, more affordable, and easier to deploy. We offer complete solutions for autonomous drones, advanced driver-assistance systems (ADAS), autonomous vehicles, and industrial sensing – incorporating a combination of millimeter-wave (mmWave) radar, sensor fusion, and arAficial intelligence (AI).
For years, cost, weight, and performance constraints have hindered the wider adoption of radar. Einstein makes radar systems accessible to everyone by overcoming these constraints. One recent innovation: we’ve developed the world’s first UAV collision avoidance radar with 4D detection.
Radar systems and sensor data processing intelligence are keys to our autonomous future. We offer deep scienAfic, mathematical and engineering expertise along with a full spectrum portfolio (24GHz, 60GHZ, 76-81GHz) of hardware and software to support our customers in developing highly customized solutions with unmatched precision in unpredictable environments.
Our core team has more than a combined 100 years of experience in radar research and development with deep knowledge gained through projects funded by NASA, the U.S. NaAonal Science Foundation (NSF), the European Space Agency, and others.
Other radar companies are at least two to three years behind Einstein. Startups have been slow to market and are unable to produce at scale, while established companies are slow to adopt the newest technological innovations.
Einstein products can be fully customized to specific application requirements, have unmatched precision in ALL weather conditions and surface types, and are a fraction of the price of compeAAve products.
Visit our website (www.ainstein.ai) for more information, or get in touch with Andrew Boushie, Vice President for Strategy and Partnerships, at [email protected] to arrange a phone call.
ADDRESS:
2029 Becker Drive,
Lawrence, KS 66047 USA
EMAIL:
[email protected]
PHONE: 785-856-0460



















